Insight: Jointly reason on prediction uncertainty and sensor coverage
Tl;dr - Predict multiple maps → estimate uncertainty and sensor coverage → explore to build accurate maps faster
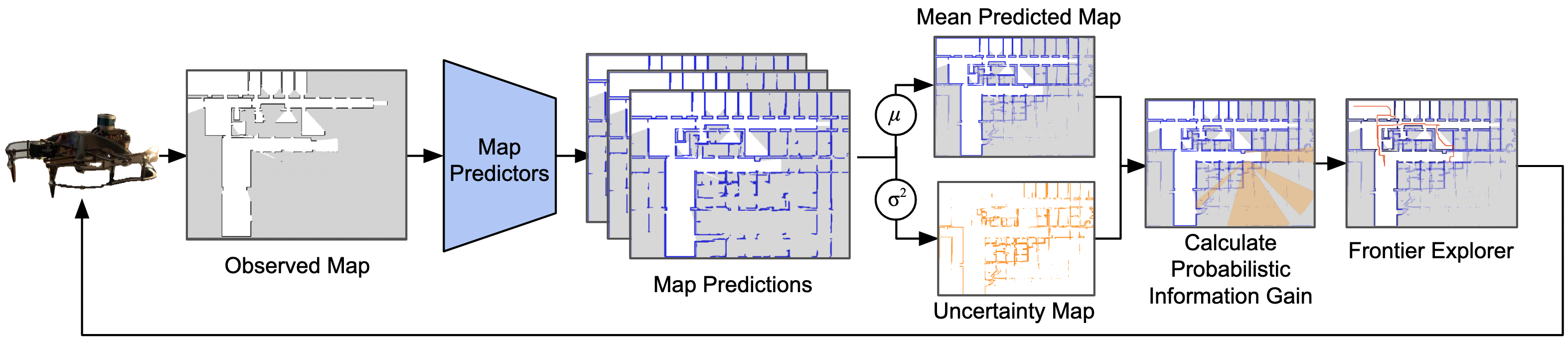
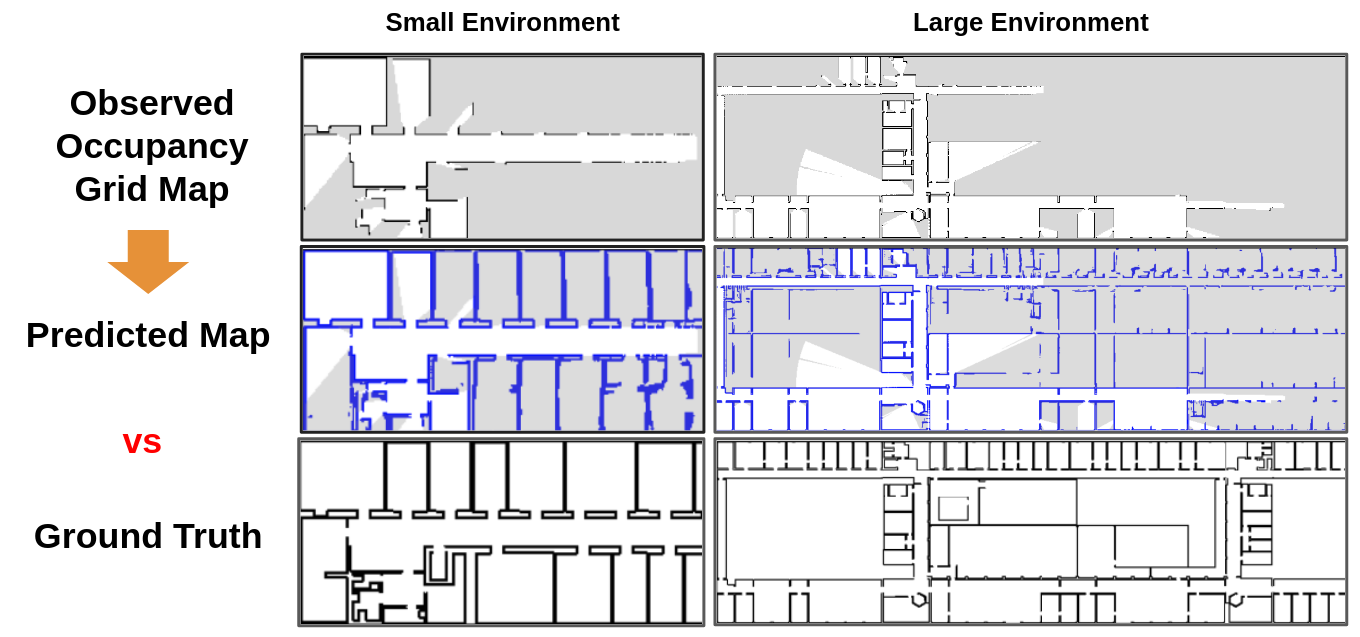
Given the observed occupancy grid maps, our LaMa model predictor can generate reasonable predicted maps that are close to the ground-truth maps. These predictions are used in MapEx for probabilistic raycasting and viewpoint scoring.
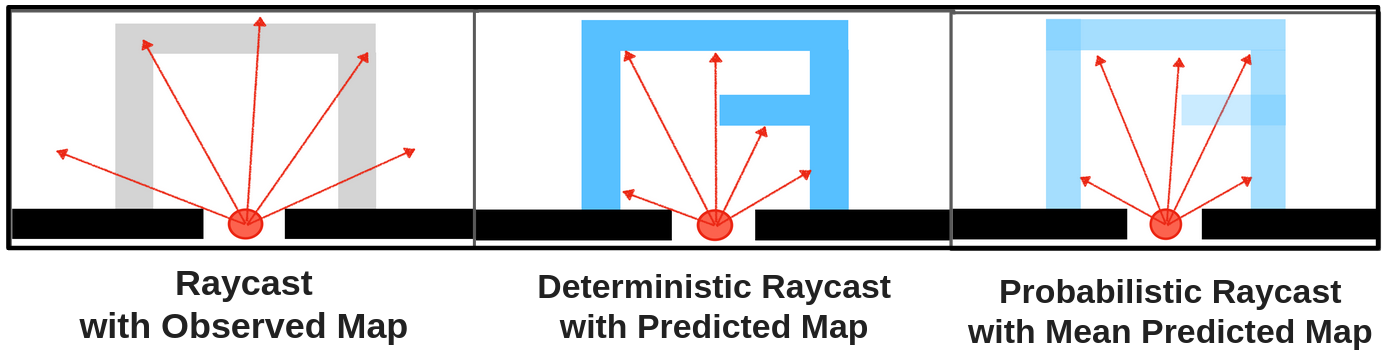
Left: Conventional raycasting using only the observed occupancy grid map tends to overestimate the potential sensor coverage at a given viewpoint.
Middle: Deterministic raycasting with a predicted map can address this issue but often terminates rays prematurely if the predictions are inaccurate, leading to an underestimation of the information gain at the viewpoint.
Right: To overcome these limitations, we employ probabilistic raycasting on the mean predicted map. Each ray begins with an initial accumulated occupancy value of 0. As the ray traverses through the pixels of the mean predicted map, it incrementally adds the occupancy value of each pixel. Once the accumulated value reaches a predefined threshold, the raycasting process stops.
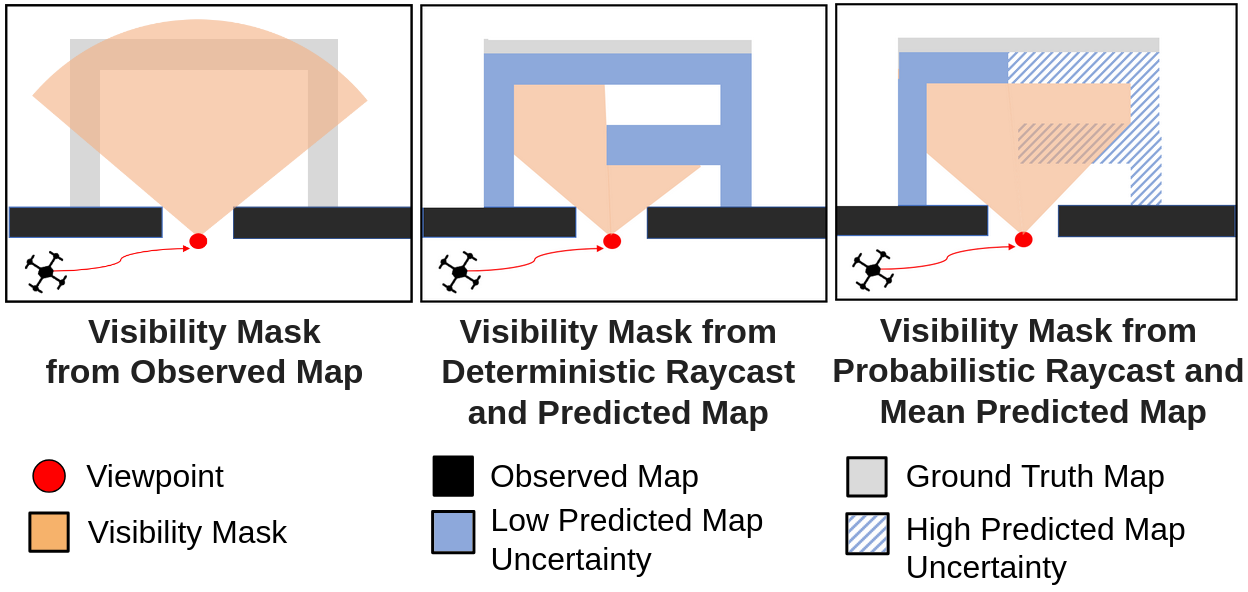
Given ray end points, we perform a flood-fill algorithm to generate a sensor coverage mask, and then mask out already-observed areas from the sensor coverage mask to generate a visibility mask.
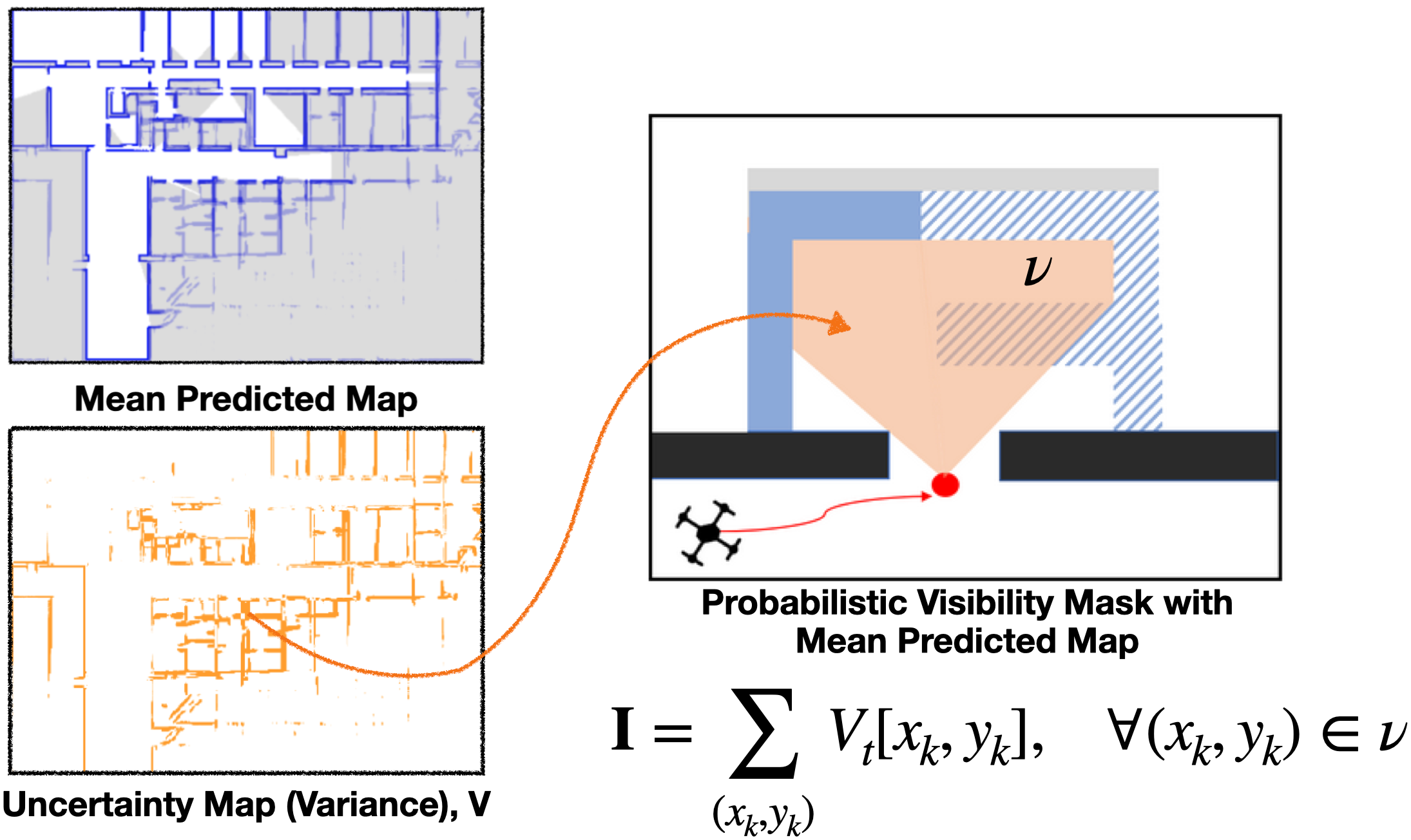
Using probabilistic raycasting on the mean predicted maps, we generate a visibility mask that probabilistically represents the unknown area estimated to be visible at each viewpoint.
We model the uncertainty of the predictions, by computing the pixel-wise variance of ensemble of map predictions.
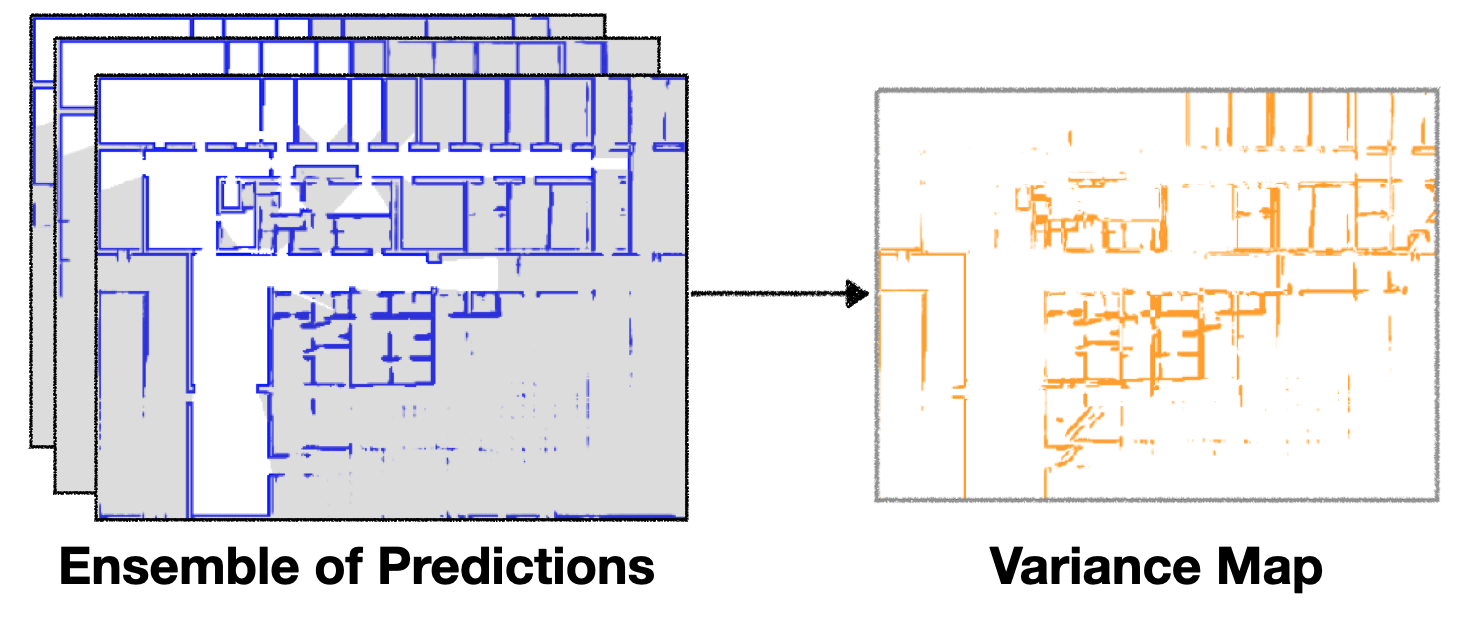
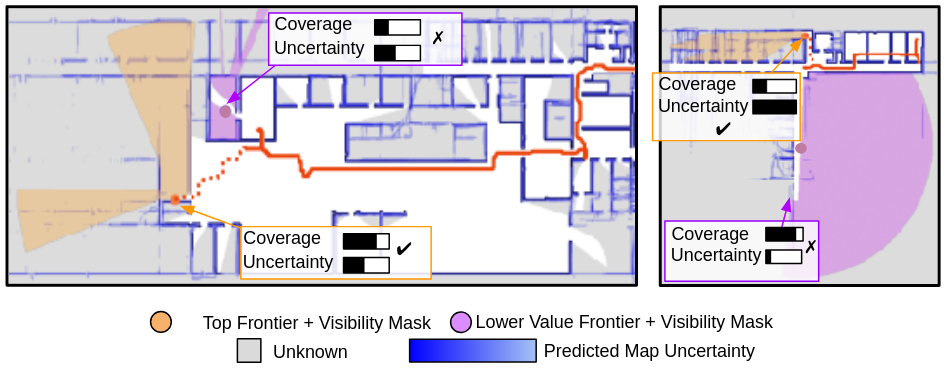
To compute the information gain at each viewpoint, we use both the visibility mask generated from probabilistic raycast and the variance map. We sum the values of all pixels in the variance map that also fall within the visibility mask.
This probabilistic information gain estimates the potential reduction in uncertainty, not just by considering the size of observable area but also the variance it will cover.